Sonar configuration parameters.
More...
#include <gemini_sonar_node.hpp>
|
| std::string | frame_id = "gemini_fls" |
| | TF frame ID for sonar data.
|
| |
| std::string | log_directory = "/data/gemini" |
| | Directory to save GLF log files.
|
| |
| uint16_t | sonar_id = 0 |
| | Sonar ID (default 1, 0 will reach all sonars on network)
|
| |
| std::string | software_mode = "Evo" |
| | SDK mode: Evo, EvoC, SeaNet, SeaNetC.
|
| |
| double | range_m = 10.0 |
| | Range in meters (1-120m for 720kHz, 1-50m for 1200kHz)
|
| |
| double | gain_percent = 50.0 |
| | Receiver gain (0-100%)
|
| |
| double | aperture = 120.0 |
| | Sonar aperture in degrees (Switch between: 120 or 65)
|
| |
| int | sound_speed_ms = 1500 |
| | Sound speed in m/s.
|
| |
| bool | sound_speed_manual = false |
| | Sound speed mode: true=manual, false=auto (uses sonar SOS sensor)
|
| |
| int | chirp_mode = 2 |
| | Chirp mode: 0=disabled, 1=enabled, 2=auto.
|
| |
| bool | high_resolution = true |
| | High resolution mode (1200ik only)
|
| |
| int | frequency_mode = 0 |
| | Frequency selection: 0=auto, 1=low(720kHz), 2=high(1200kHz), 3=combined.
|
| |
| double | frequency_auto_threshold_m = 40.0 |
| | Threshold (m) for auto mode to switch LF/HF (1-50m valid)
|
| |
| bool | ping_free_run = false |
| | Ping mode: true=continuous, false=interval-based.
|
| |
| int | ping_interval_ms = 100 |
| | Ping interval in ms (0-999) when free_run=false.
|
| |
| bool | ping_ext_trigger = false |
| | External TTL trigger: true=hardware trigger, false=software.
|
| |
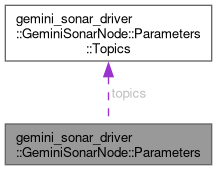
| struct gemini_sonar_driver::GeminiSonarNode::Parameters::Topics | topics |
| |
Sonar configuration parameters.
◆ Parameters()
| GeminiSonarNode::Parameters::Parameters |
( |
| ) |
|
◆ declare()
◆ update()
◆ aperture
| double gemini_sonar_driver::GeminiSonarNode::Parameters::aperture = 120.0 |
Sonar aperture in degrees (Switch between: 120 or 65)
◆ chirp_mode
| int gemini_sonar_driver::GeminiSonarNode::Parameters::chirp_mode = 2 |
Chirp mode: 0=disabled, 1=enabled, 2=auto.
◆ frame_id
| std::string gemini_sonar_driver::GeminiSonarNode::Parameters::frame_id = "gemini_fls" |
TF frame ID for sonar data.
◆ frequency_auto_threshold_m
| double gemini_sonar_driver::GeminiSonarNode::Parameters::frequency_auto_threshold_m = 40.0 |
Threshold (m) for auto mode to switch LF/HF (1-50m valid)
◆ frequency_mode
| int gemini_sonar_driver::GeminiSonarNode::Parameters::frequency_mode = 0 |
Frequency selection: 0=auto, 1=low(720kHz), 2=high(1200kHz), 3=combined.
◆ gain_percent
| double gemini_sonar_driver::GeminiSonarNode::Parameters::gain_percent = 50.0 |
◆ high_resolution
| bool gemini_sonar_driver::GeminiSonarNode::Parameters::high_resolution = true |
High resolution mode (1200ik only)
◆ log_directory
| std::string gemini_sonar_driver::GeminiSonarNode::Parameters::log_directory = "/data/gemini" |
Directory to save GLF log files.
◆ ping_ext_trigger
| bool gemini_sonar_driver::GeminiSonarNode::Parameters::ping_ext_trigger = false |
External TTL trigger: true=hardware trigger, false=software.
◆ ping_free_run
| bool gemini_sonar_driver::GeminiSonarNode::Parameters::ping_free_run = false |
Ping mode: true=continuous, false=interval-based.
◆ ping_interval_ms
| int gemini_sonar_driver::GeminiSonarNode::Parameters::ping_interval_ms = 100 |
Ping interval in ms (0-999) when free_run=false.
◆ range_m
| double gemini_sonar_driver::GeminiSonarNode::Parameters::range_m = 10.0 |
Range in meters (1-120m for 720kHz, 1-50m for 1200kHz)
◆ software_mode
| std::string gemini_sonar_driver::GeminiSonarNode::Parameters::software_mode = "Evo" |
SDK mode: Evo, EvoC, SeaNet, SeaNetC.
◆ sonar_id
| uint16_t gemini_sonar_driver::GeminiSonarNode::Parameters::sonar_id = 0 |
Sonar ID (default 1, 0 will reach all sonars on network)
◆ sound_speed_manual
| bool gemini_sonar_driver::GeminiSonarNode::Parameters::sound_speed_manual = false |
Sound speed mode: true=manual, false=auto (uses sonar SOS sensor)
◆ sound_speed_ms
| int gemini_sonar_driver::GeminiSonarNode::Parameters::sound_speed_ms = 1500 |
◆ topics
The documentation for this struct was generated from the following files: